TechnicalExpertise
Multidisciplinary skills spanning quantum circuits, generative AI, and mission-critical swarm robotics.
Generative AI
RAG Techniques, Hierarchical Privacy Layers, Agentic AI, and Prompt Engineering for secure enterprise automation.
Machine Learning
Multi-Agent RL (MARL), Game Theory, GNNs, Hybrid Quantum-ML, and Quantum Spiking Neural Networks (QSNN).
Data Science
Time Series Forecasting (ARIMA, Random Forest), K-Means & hierarchical clustering, SQL pipelines, and KPI design.
Robotics & Perception AI
MLOps for autonomous systems, vision Transformers, ROS 2 middleware, offboard control, and swarm coordination.
Featured Research

A Novel Hybrid Quantum–Classical Path Optimization for Methane Detection
IEEE Access • First Author
Dakota State University — Research Assistant
Built an end-to-end methane leak detection and drone routing system combining Classical ML, Quantum Optimization (QAOA/QUBO), and Classical Path Refinement for mission-ready planning. The hybrid planner scheduled 21 unique targets across 4 drones with zero revisits, delivering ~50% lower energy and battery usage compared to classical grid baselines.
- Implemented leak-risk scoring with CatBoost using wind-direction sin/cos features and chronological 20% test split.
- Generated smooth routes via PCA + Gaussian KDE + deterministic 8-neighborhood gradient-ascent; achieved grid length ≈ 9.49 and ΔS = 0.279 on test map.
- Engineered a 42-dimensional quantum-inspired embedding (PC1+PC2 = 57.6% variance) supporting structured separability.
- Formulated waypoint selection as QUBO + QAOA with K=5, 12 unique targets, 0 revisits across 4 drones.
- Demonstrated ~50% lower energy (0.926 Wh Hybrid vs 1.852 Wh Classical) and battery usage over GBDT–GA / Greedy-NN / NN→2-opt baselines.

Quantum-Inspired Spiking Neural Network for Autonomous Methane Leak Detection
Research Project • First Author
Dakota State University — Research Assistant
Developed a research-grade autonomous methane leak detection pipeline for UAV-based environmental monitoring — integrating neuromorphic encoding, organoid-inspired preprocessing, quantum-inspired recurrent spiking prediction, Riemannian mission planning, and multi-drone reinforcement learning under realistic time-aware evaluation.
- Designed biologically inspired representations via spike-based neuromorphic encoding and organoid-inspired latent feature simulation.
- Developed a QIF-RSNN-based leak prediction module achieving 0.8824 validation PR-AUC and 0.7679 test ROC-AUC under chronological split.
- Implemented a Riemannian route-planning baseline with 0.3846 top-priority coverage and 0.5544 mean hazard visited.
- Improved downstream mission performance using 4-drone MARL coordination — top-priority coverage up to 0.4721, mean hazard visited to 0.6772.
Autonomous UAV Systems Lab
Faculty-Guided Independent Study • Robotics AI
Dakota State University — Autonomous Systems Lab
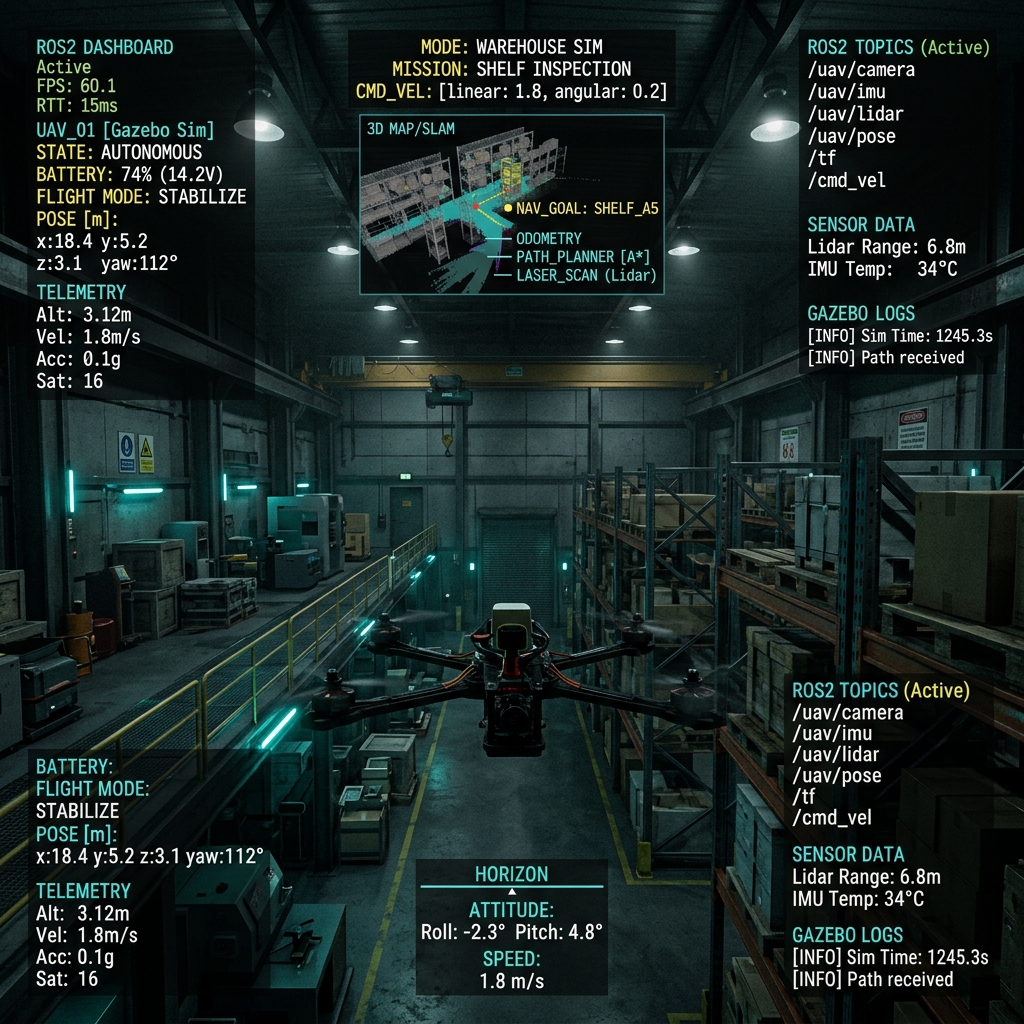
Designed and implemented a drone-centric robotics simulation and autonomy stack using PX4 SITL, Gazebo, and ROS 2 Jazzy — bridging robotic systems integration with AI-driven autonomy. Built core infrastructure for autonomous aerial systems including middleware communication, sensor stream validation, transform handling, and offboard control, structured to support SLAM, perception, waypoint autonomy, and AI-based decision layers.
- Integrated PX4 SITL, Gazebo, and ROS 2 Jazzy into a unified UAV simulation environment for autonomous robotics experimentation.
- Built ROS 2 C++ nodes for topic publishing, topic bridging, and robotic middleware interoperability.
- Configured Gazebo SITL for sensor stream validation and real-time simulation feedback.
- Implemented TF2 transform handling and frame-consistent pose data pipelines for downstream autonomy tasks.
- Established offboard control foundations for simulated drone command and trajectory execution.
- Prepared the full stack for SLAM, waypoint autonomy, perception, and AI-based decision-making in autonomous drone missions.
Technical Projects

MARL & Game Theory Drone Coordination
- Developed a decentralized coordination framework for drone swarms using Multi-Agent Reinforcement Learning (MARL).
- Integrated Game-Theoretic strategies (Nash Equilibrium) to optimize inter-agent decision-making and swarm cohesion in dynamic environments.
- Utilized Stable-Baselines3 (PPO) and custom environments to train agents for high-stakes coordination tasks.
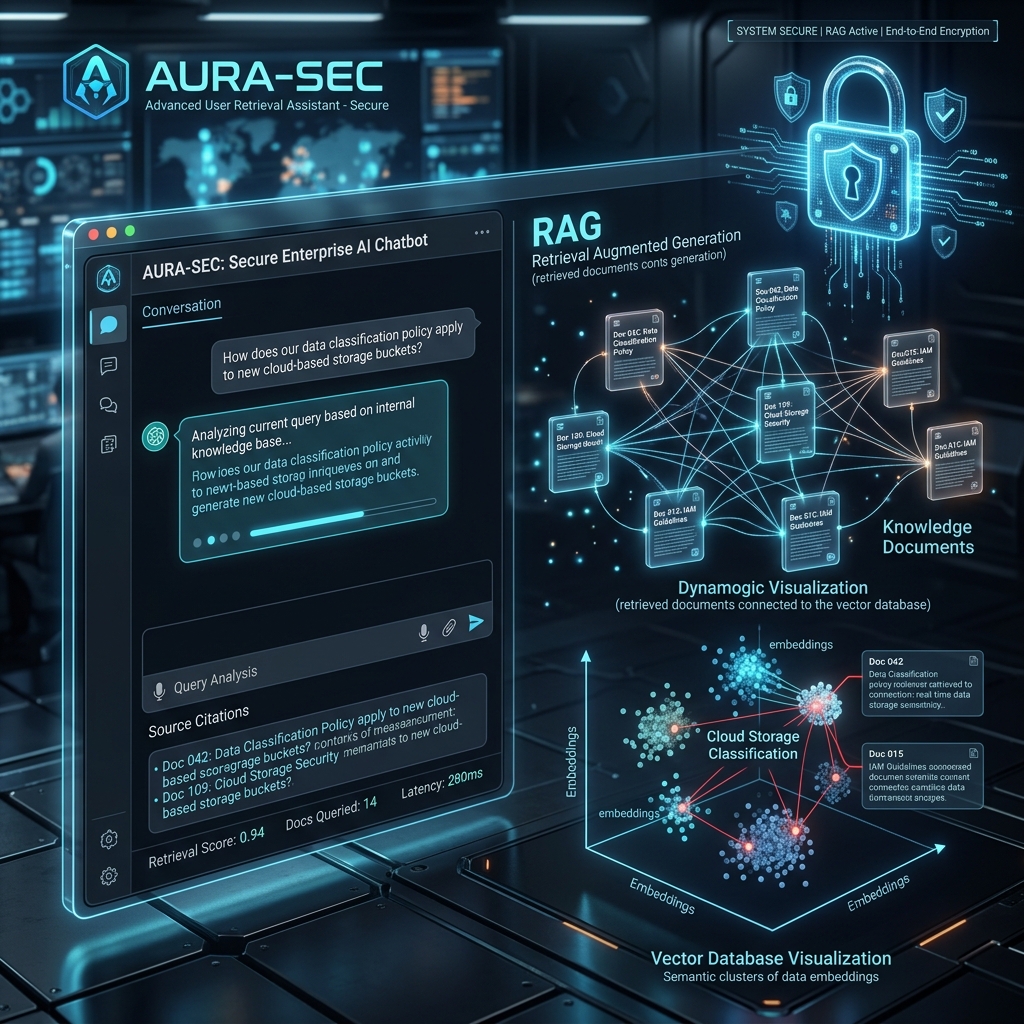
Secure Enterprise RAG Chatbot
- Architected a private Retrieval-Augmented Generation (RAG) system for commercial institutions to prevent data leakage to public LLMs.
- Developed a hierarchical access control layer that filters responses based on user authorization levels, ensuring strict privacy for internal company policies.
- Implemented local LLM deployment and vector database indexing to maintain high security within corporate firewalls.
Building
Intelligent
Systems.
A product-focused AI engineer with 7+ years of experience bridging the gap between theoretical research and production-grade solutions — from enterprise data pipelines to quantum-classical UAV systems.
Professional Experience
Dakota State University
- Published 1st author of IEEE Access paper: Hybrid Quantum-Classical Path Optimization for Methane Detection.
- Developed hybrid quantum-classical methane-leak pipeline achieving maximum accuracy.
- Optimized drone waypoints using QAOA — routing 5× faster than classical methods.
- Engineered GNN encoders for spatial relations in multi-agent air-traffic systems.
- Currently developing Quantum Spiking Neural Networks (QSNN) for neuromorphic encoding.
E Mech Solutions
- Applied Time Series Forecasting (ARIMA, RF) to predict monthly revenue — 12% uplift in forecast accuracy.
- Built Python/SQL data pipelines for ETL from large-scale databases.
- Used K-Means and hierarchical clustering to identify 3 high-value customer segments.
- Launched targeted marketing initiatives resulting in a 20% lift in engagement.
Education
MS in CS with AI Specialization
GPA: 3.9/4.0 — "A" grades in all first-semester coursework. Selected for the prestigious DSU-AI Sweden Program.
Architecting intelligent autonomy at the intersection of quantum computing and mission-critical robotics.